
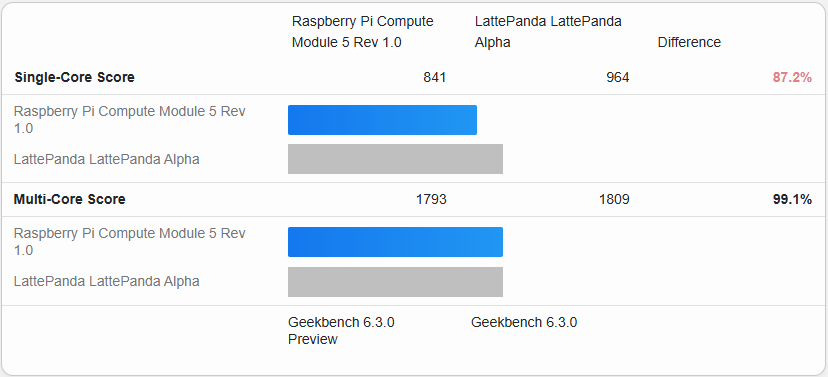
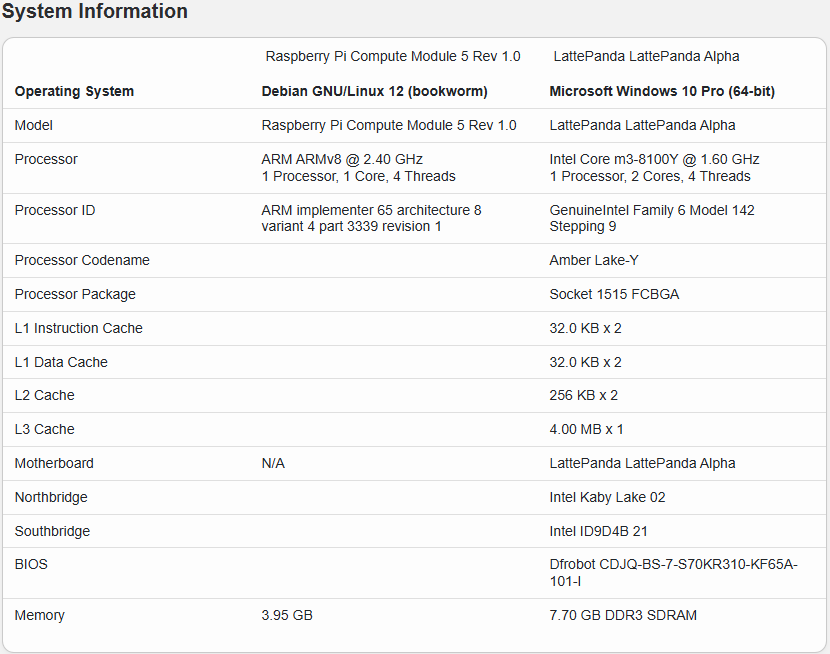
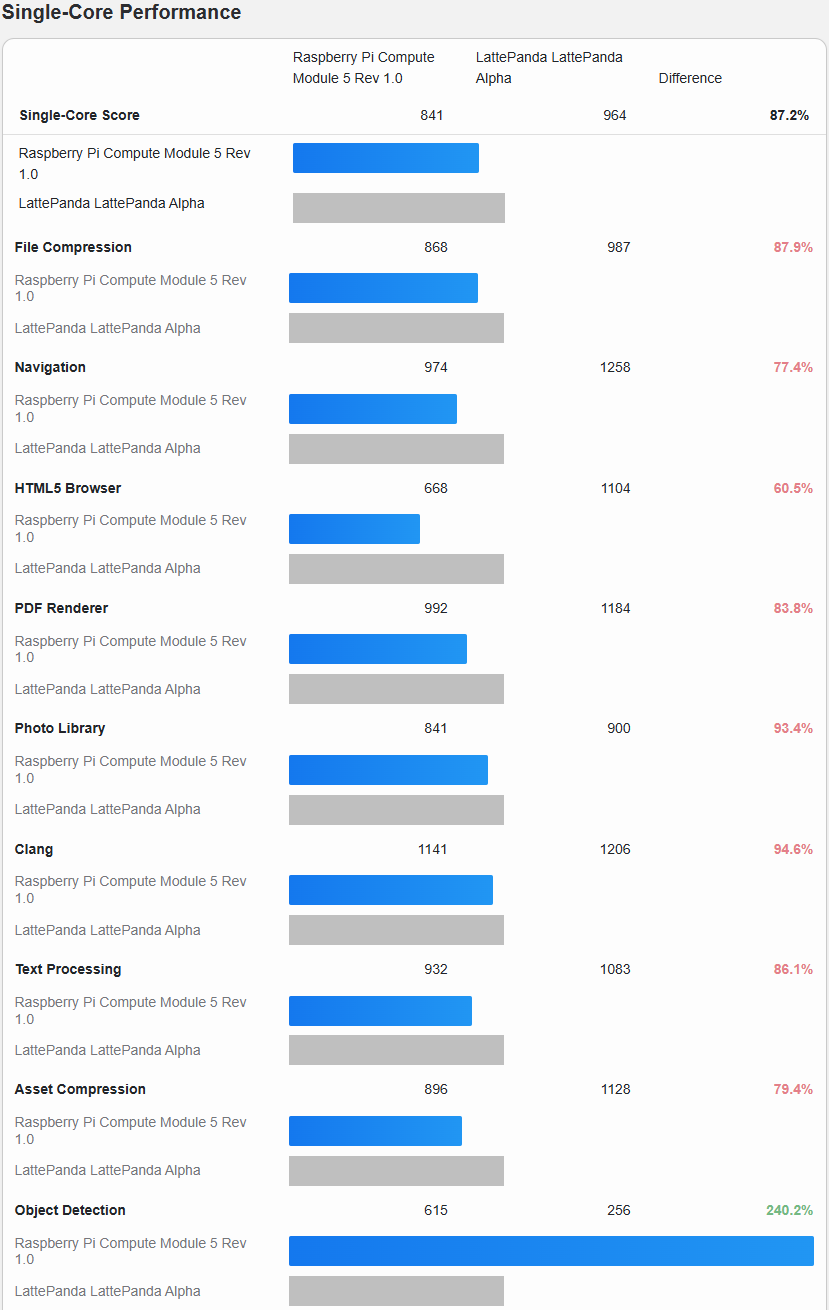
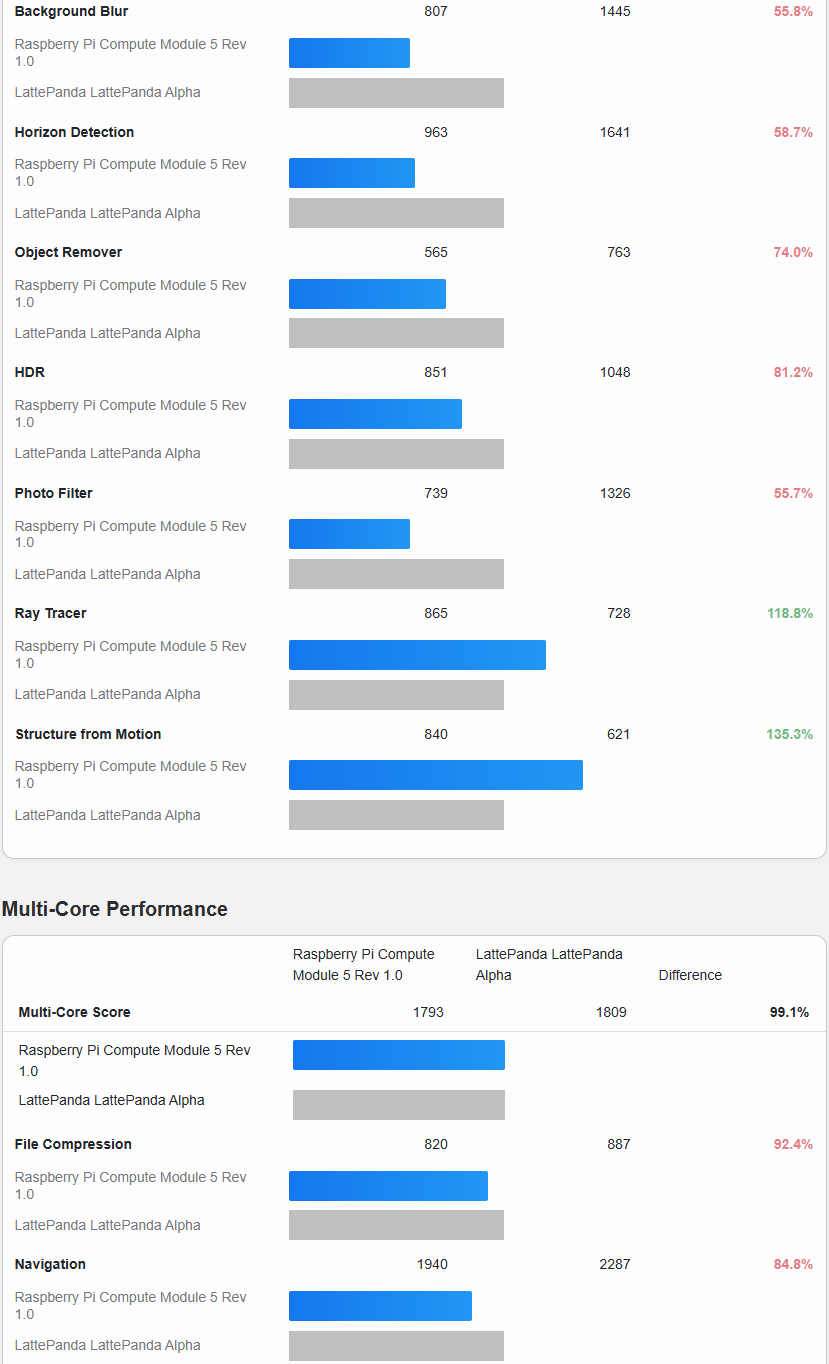
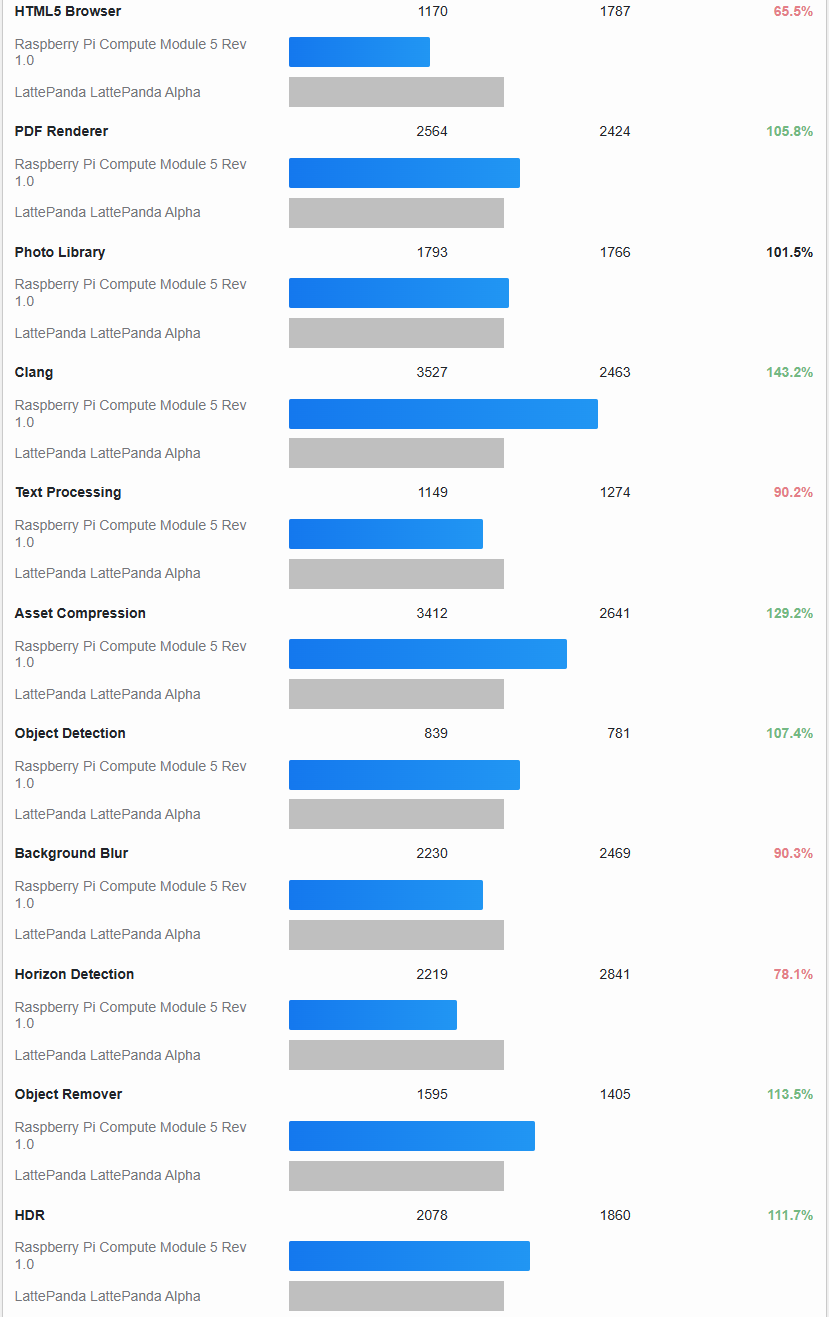
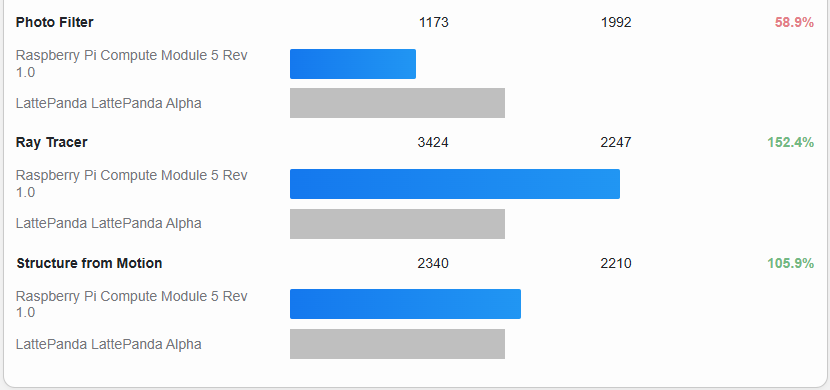
Raspberry Pi Compute Module 5 Rev 1.0 vs LattePanda LattePanda Alpha(Geekbench 6)
'Raspberry Pi > 성능 비교' 카테고리의 다른 글
| Raspberry Pi Compute Module 5 Rev 1.0 vs RK3588 OPi 5 Plus(Geekbench 6) (0) | 2025.03.19 |
|---|---|
| Raspberry Pi 5 Model B Rev 1.0 vs RK3588S OPi 5 Pro(Geekbench 6) (0) | 2025.03.19 |





























































