|
MCU
|
STM32F103(ST)
|
|
IDE
|
Atollic(TrueSTUDIO), STM32CubeMX
|
|
목표
|
위 MCU와 IDE 환경에서 개발을 위한 MCU 기본 설정
|
1. STM32CubeMX 실행
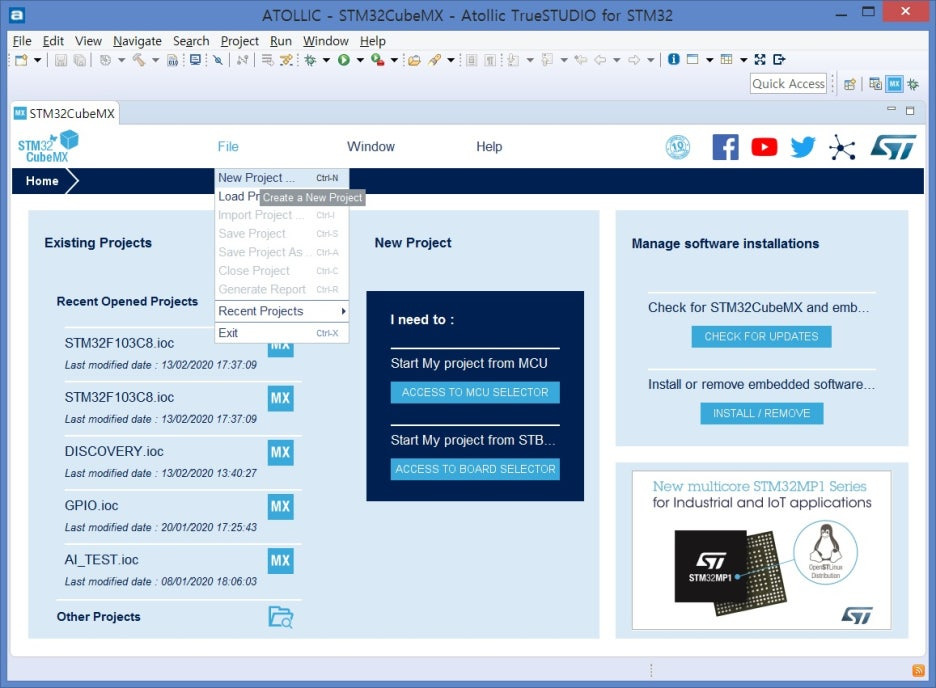
- New Project
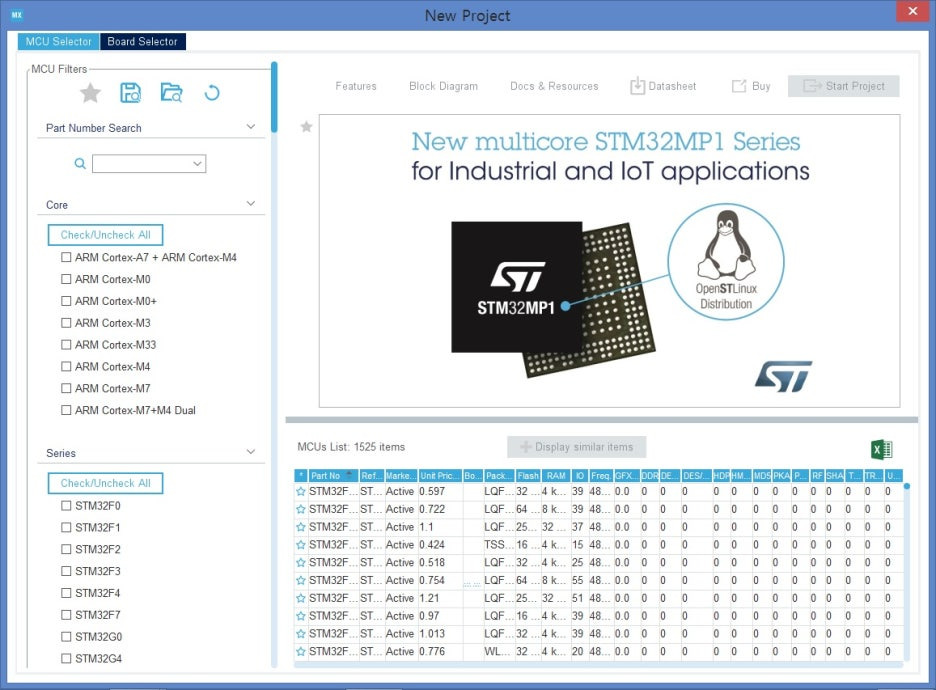
- Part Number Search : STM32F103C8-LQFP48
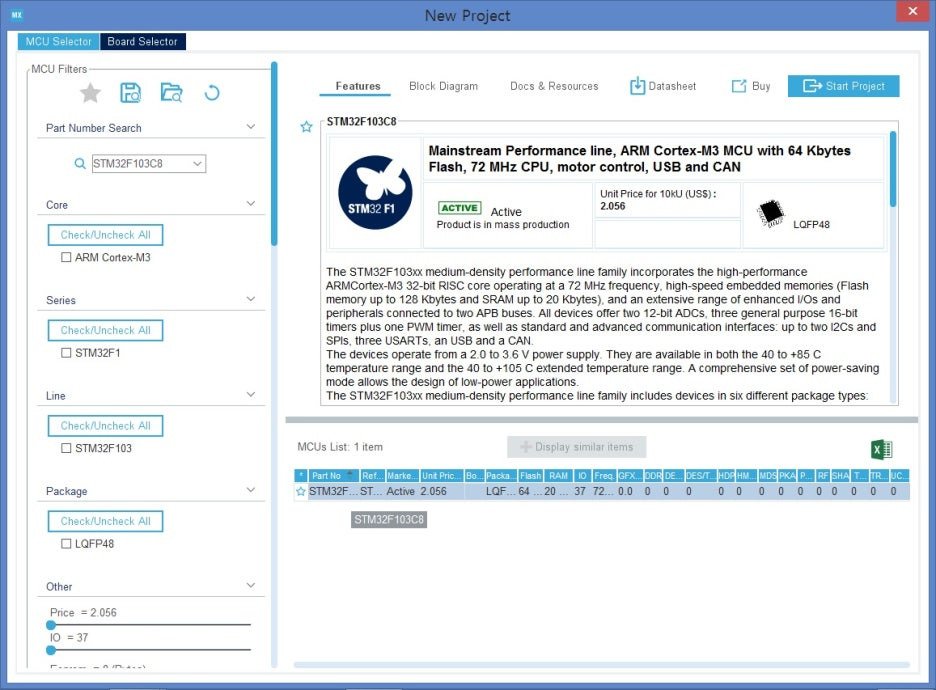
- Start Project

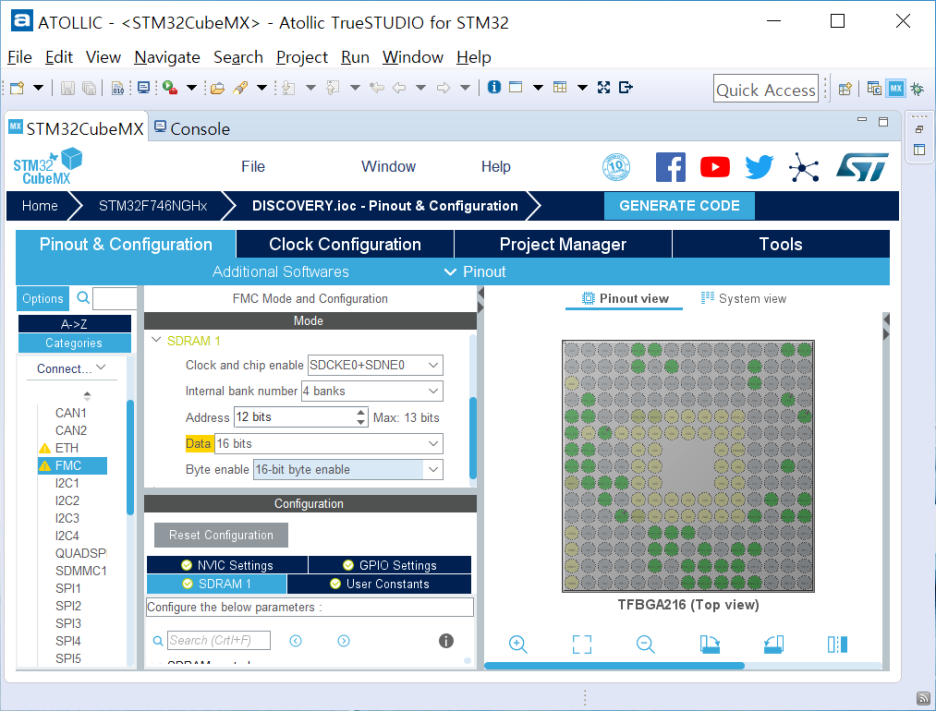
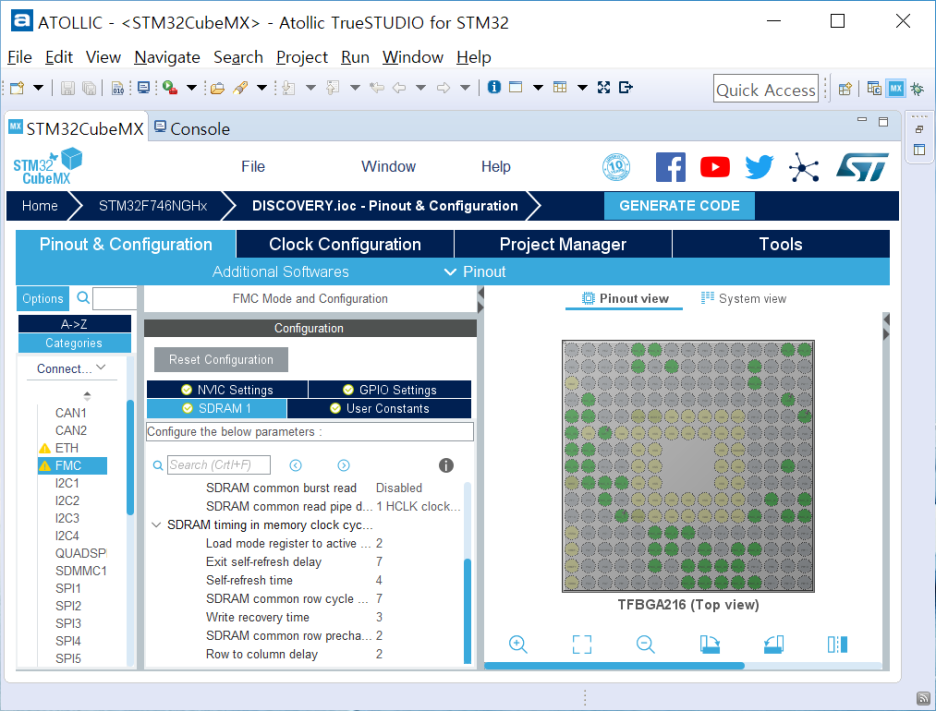
- Pinout 설정
- Peripheral Tree에서 설정
- Pin을 직접 설정
2. SYS(ST-LINK 사용을 위해서는 설정해야 함, ISP mode 사용시 필요 없으며 ISP mode 사용 방법은 다른 곳에서 설명)
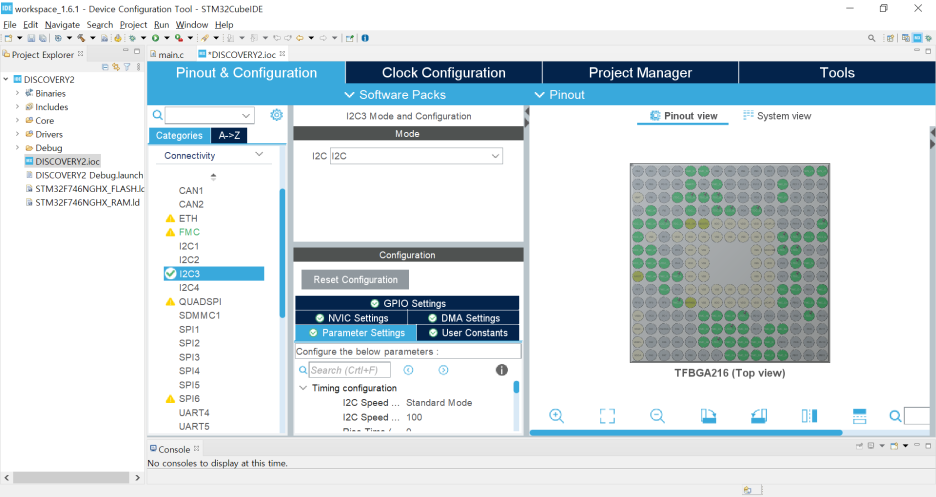
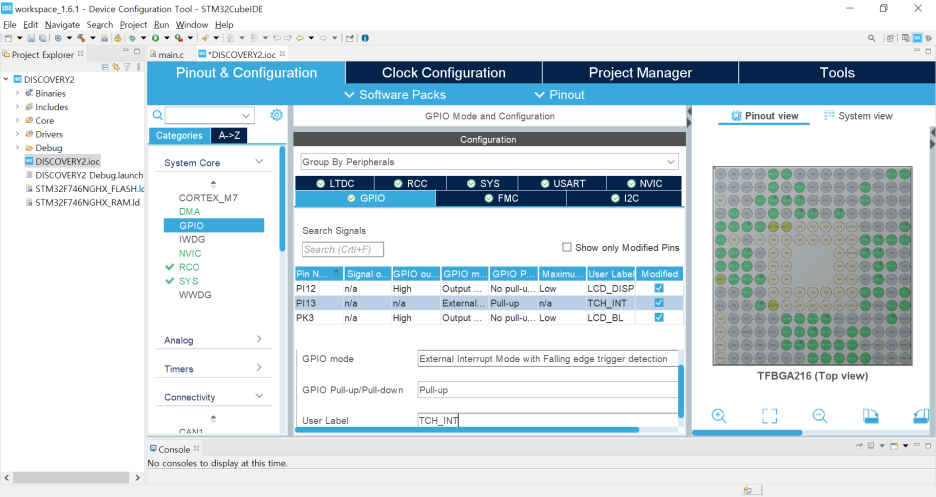
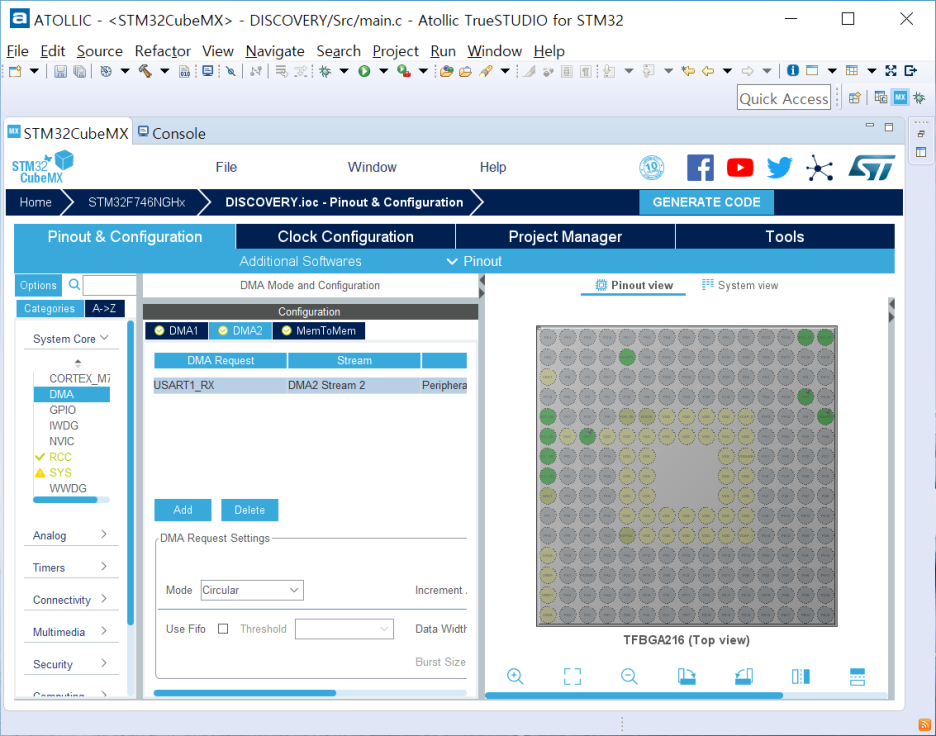
- 'Pinout & Configuration' Tab으로 이동
1) System Core 선택
2) SYS 선택
- Debug : Serial Wire(SWD) 선택
- PA13(SWDIO), PA14(SWCKL)에 자동 할당(녹색으로 표시)

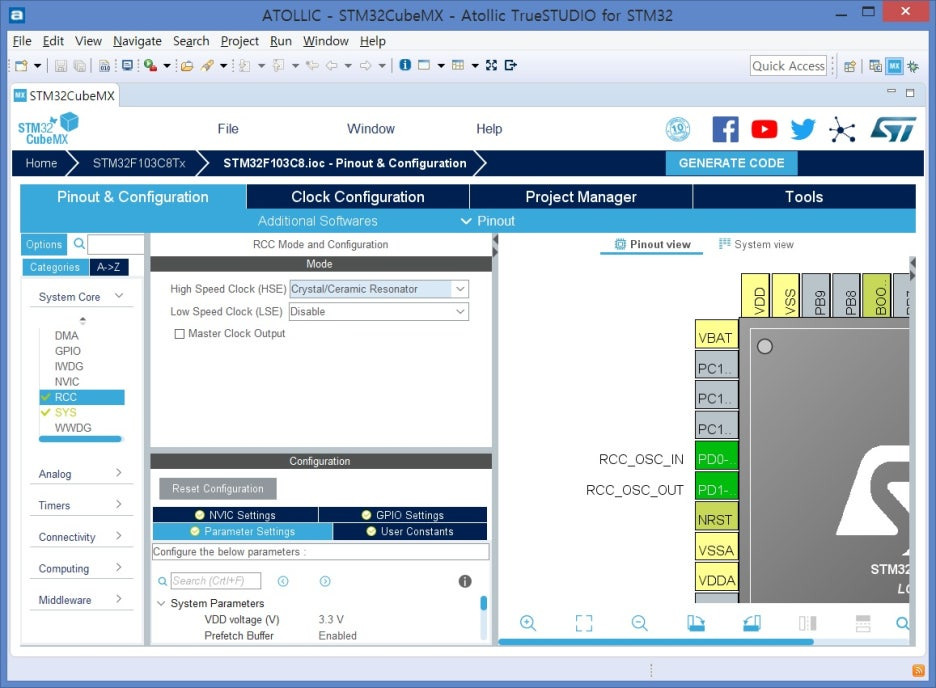
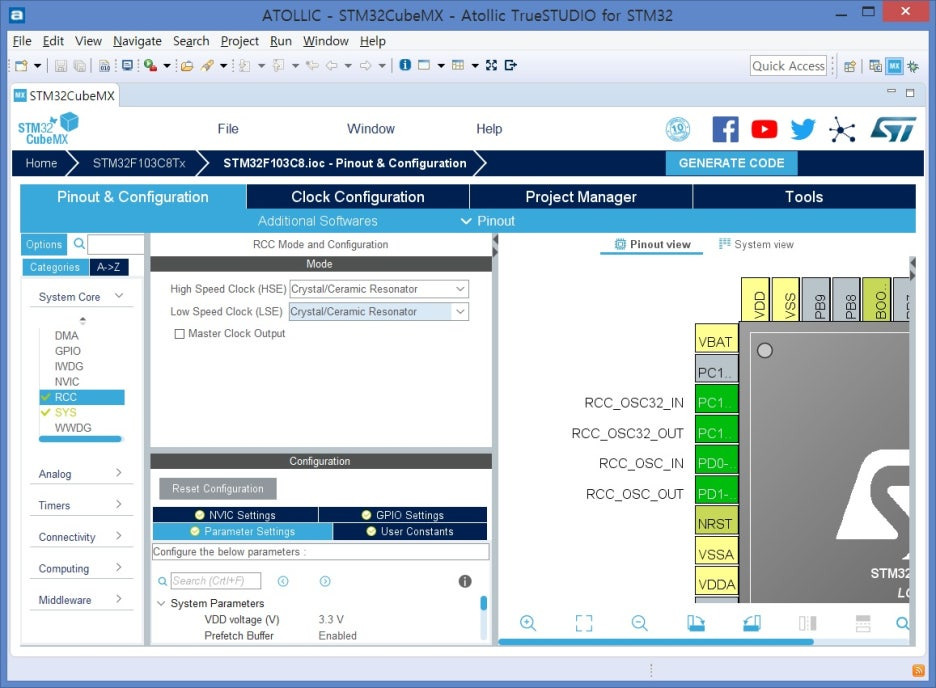
3. Clock Configuration(HSE) 설정
- 'Pinout & Configuration' Tab으로 이동
1) System Core 선택
2) RCC(Reset and Clock Control) 항목 선택
- High Speed Clock(HSE) : Crystal/Ceramic Resonator 선택
- PD0-OSC_IN(RCC_OSC_IN), PD1-OSC_OUT(RCC_OSC_OUT) 자동 할당(녹색 표시 )
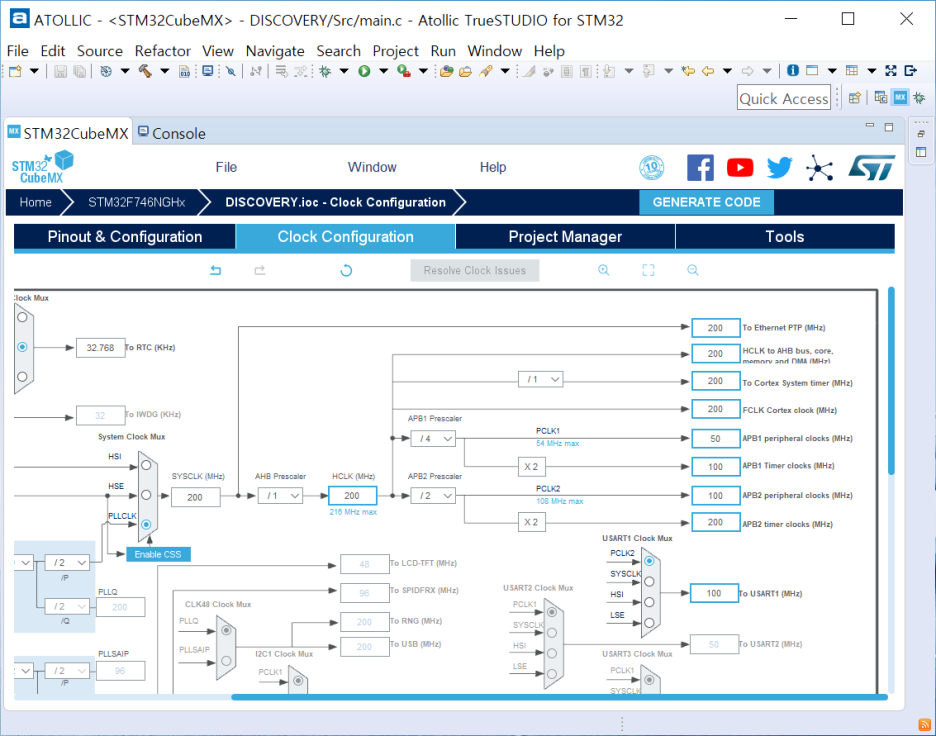
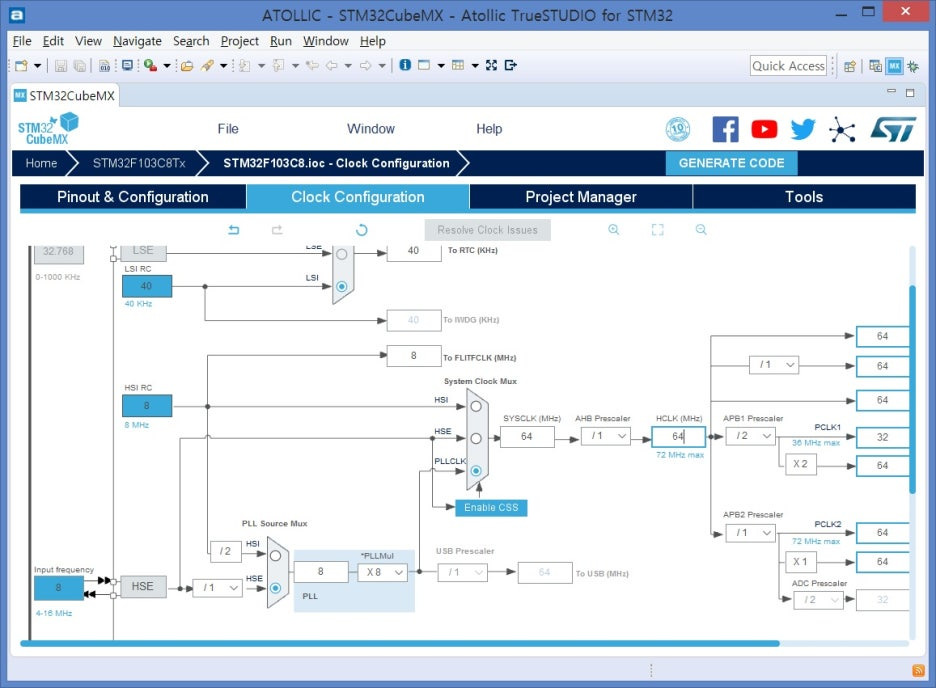
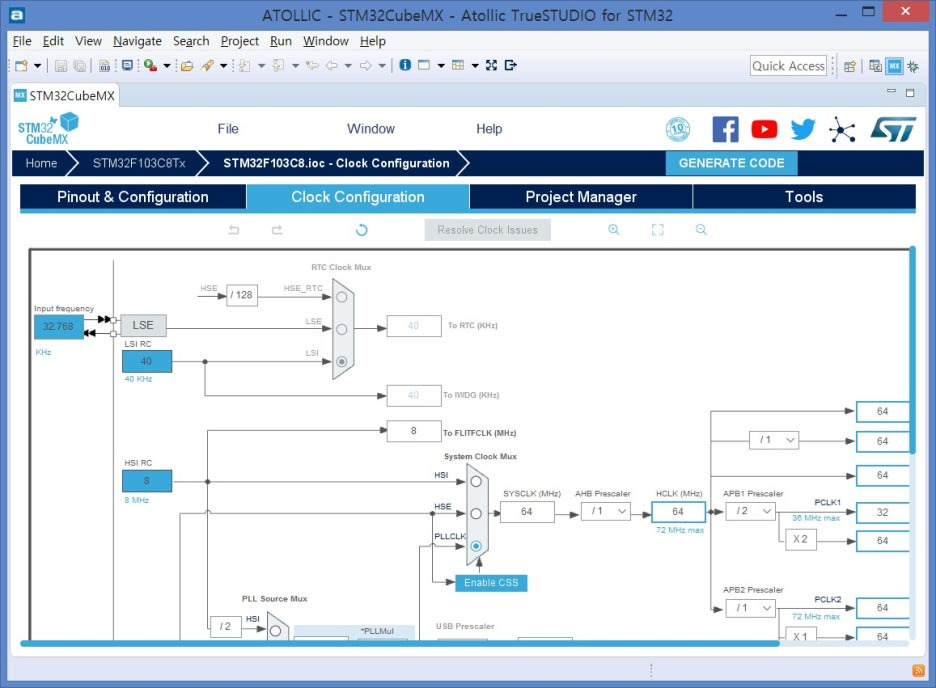
- 'Clock Configuration' Tab으로 이동
1) PLL Source Mux : HSE 선택
2) HCLK : 64(MHz) 입력
4. Clock Configuration(LSE) 설정
- 'Pinout & Configuration' Tab으로 이동
1) System Core 선택
2) RCC(Reset and Clock Control) 항목 선택
- Low Speed Clock(LSE) : Crystal/Ceramic Resonator 선택
- PC14-OSC32_IN(RCC_OSC32_IN), PC15-OSC32_OUT(RCC_OSC32_IN) 자동 할당(녹색 표시)
- 'Clock Configuration' Tab으로 이동
1) RTC Clock Mux : LSE 활성화 안됨
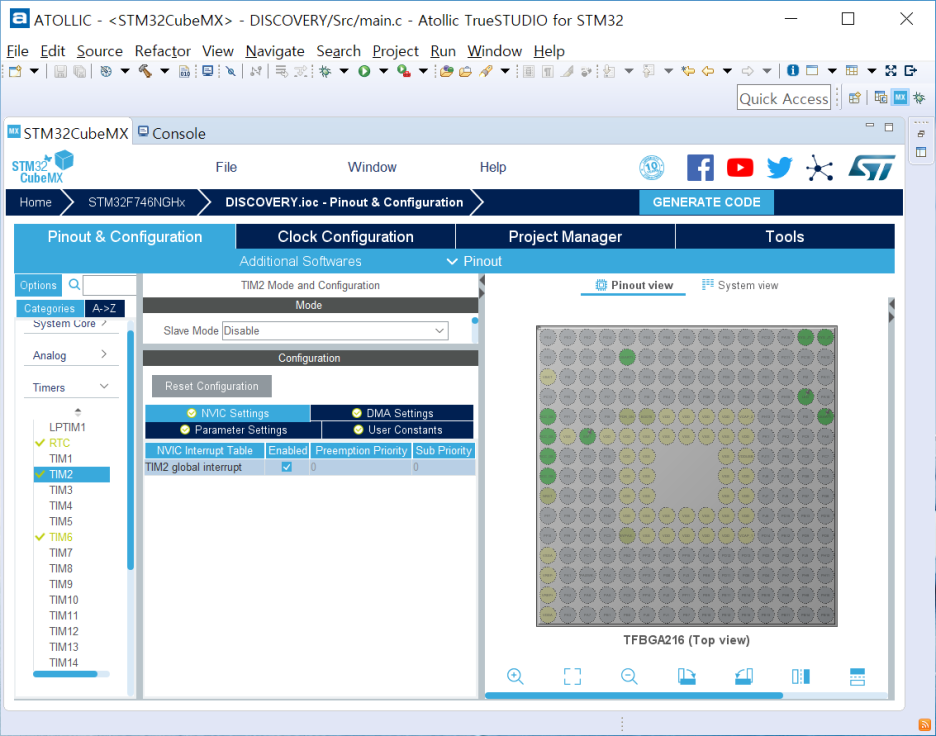
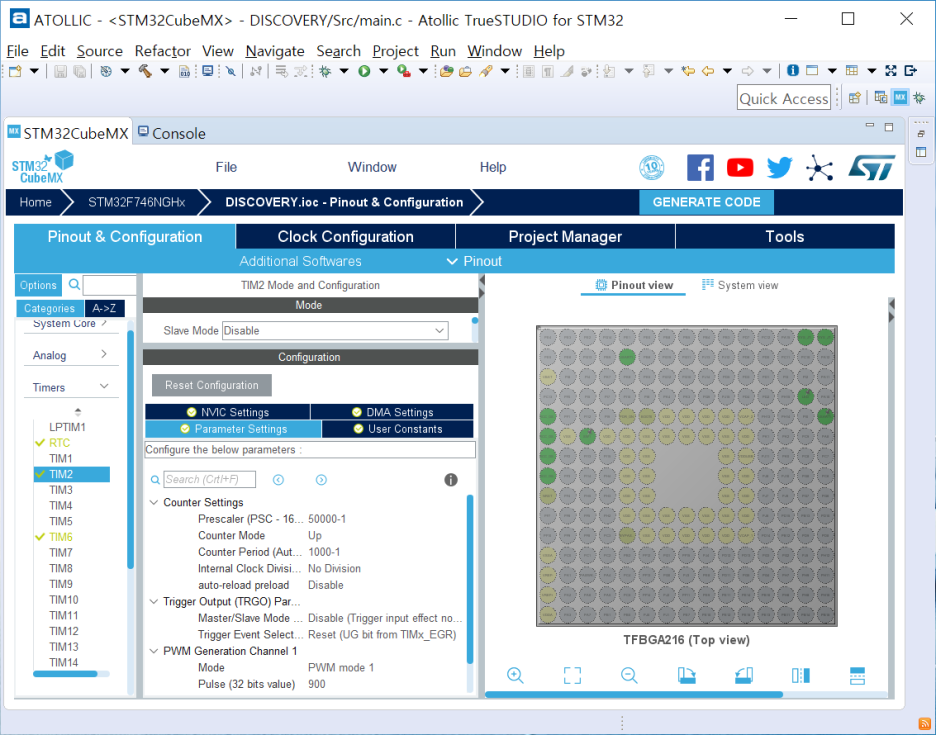
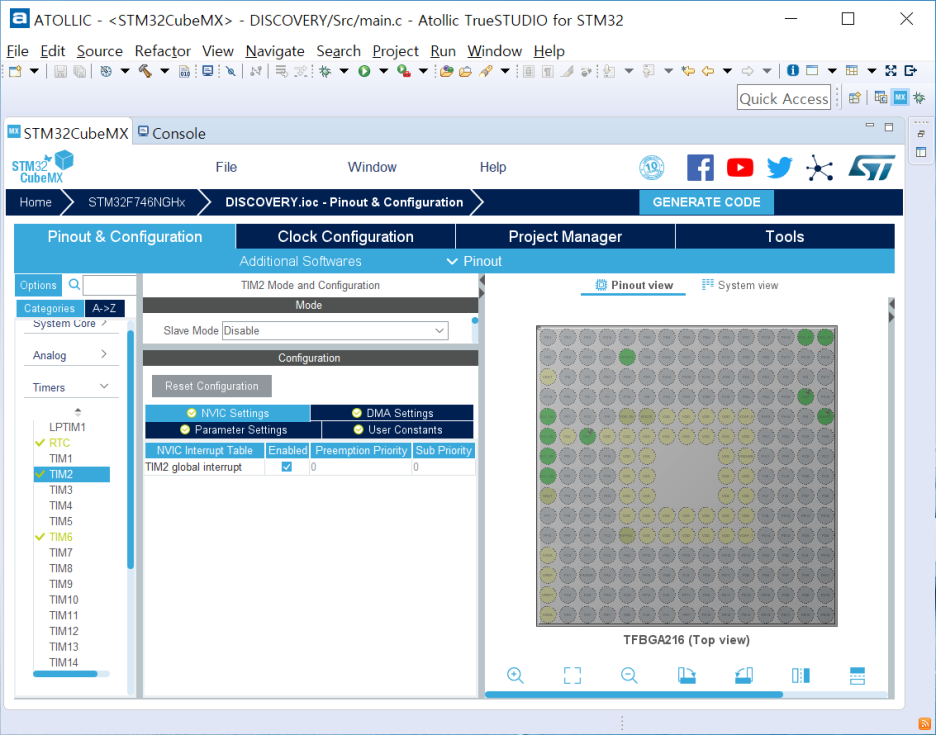
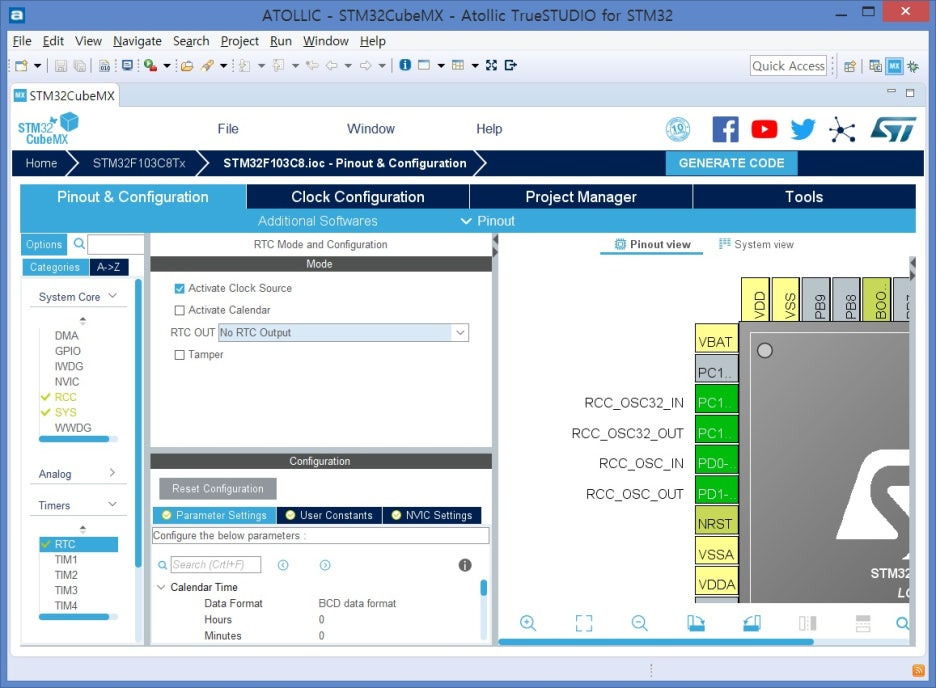
5. RTC 설정
- 'Pinout & Configuration' Tab으로 이동
1) Timers 선택
2) RTC(Real Time Clock) 항목 선택
- Activate Clock Source 체크
- RTC OUT : No RTC Output 선택
(RTC OUT = Disable 설정은 내부적으로 PC13 핀 기능을 RTC용으로 막아버림
RTC OUT = No RTC Output 설정은 RTC는 켜두되, PC13 핀은 일반 GPIO로 열어줌)
- Tamper 설정시 PC13(LED Port) 기능 제한
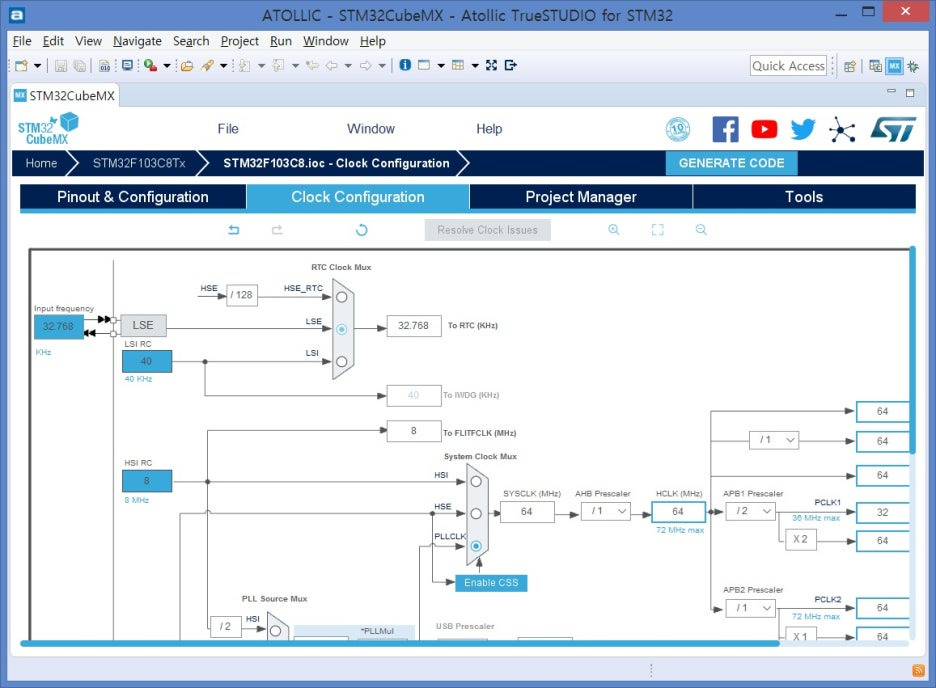
- 'Clock Configuration' Tab으로 이동
1) RTC Clock Mux : LSE 선택
- RTC 기능 설정 후 LSE 선택 가능
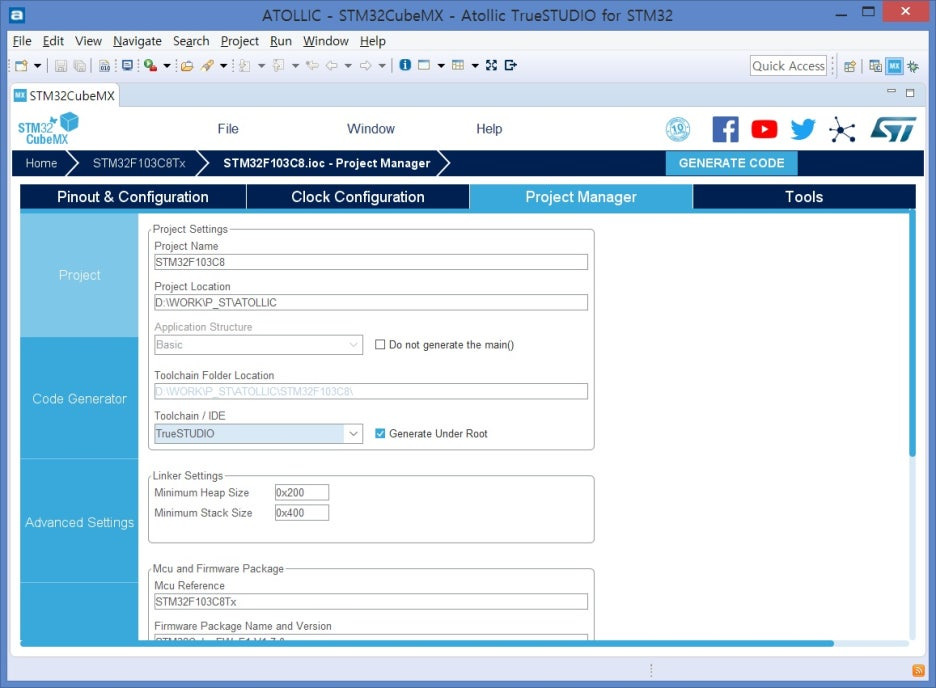
6. 'Project Manager' Tab
1) Project Name 입력
2) Toolchain / IDE 선택 : 여기서는 TrueSTUDIO 선택
※ Toolchain / IDE를 TrueSTUDIO가 아닌 다른것으로 선택하고 GENERATE CODE를 한번이라도 하면
Toolchain을 TrueSTUDIO로 다시 선택해도 ATOLLIC에서 Build가 안되는 경우가 있으니,
위 같은 실수를 했을 경우 생성된 source를 지우고 다시 GENERATE CODE 할것을 권장함
3) GENARATE CODE 클릭
'ST > STM32F103C8' 카테고리의 다른 글
| STM32F103C8 - UART(DMA) (3) | 2025.08.08 |
|---|---|
| STM32F103C8 - UART(Interrupt) (1) | 2025.08.08 |
| STM32F103C8 - UART(Polling) (1) | 2025.08.08 |
| STM32F103C8 - GPIO(EXTI) (2) | 2025.08.08 |
| STM32F103C8 - GPIO (0) | 2025.08.08 |